For the most difficult requirements, from remote-controlled to fully autonomous.
In order to fulfil its tasks, a mobile robot must above all have suitable and reliable self-localisation and navigation, obstacle detection and various actuators (e.g. the fully autonomous coupling and uncoupling of trailers or the handling of loads using a COBOT arm integrated on the AMR).
All common navigation tasks - indoor & outdoor
Our modular Innok COCKPIT™ software covers all common navigation tasks and makes it possible to optimally customise the navigation of your robot to your application. Whether remote control, following people or automatically following defined routes - Innok COCKPIT handles all the tasks required for navigating a robot. Thanks to the intuitive user interface, the software can be used efficiently by the user after a very short familiarisation period.
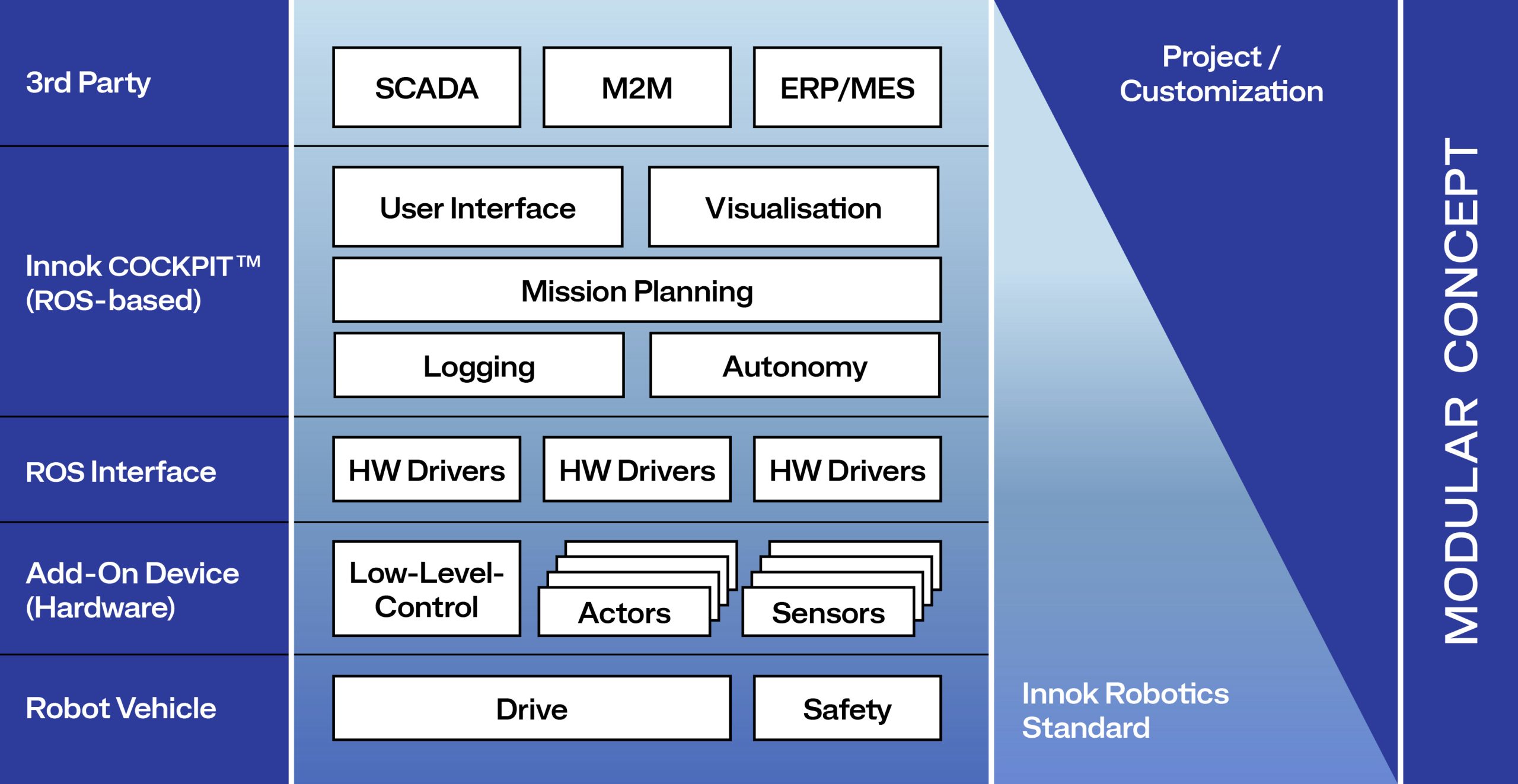
Innok COCKPIT™ is fundamentally based on the Open System robot control software libraries ROS / ROS2. The illustration shows the integration of Innok COCKPIT™ into the software stack.

Unique position Innok Robotics
In order to achieve the best precision, reliability and usability Made-in-Germany, we have continuously developed and improved the proprietary code of our Innok COCKPIT™ autonomy software over the past 10 years and enriched it with powerful algorithms for a variety of AMR tasks. Through the interaction of technically high-quality mechanical components (power batteries, high-performance electric motors, sensors, 2D/3D scanners), we produce high-quality AMRs as one of the market leaders. Thanks to intelligent, AI-based sensor data fusion, our AMRs are also able to master complicated operating situations, including in outdoor areas (outdoor or all terrain) - fields in which we sometimes have a unique position (USP) worldwide. Mobile Innok robots localise themselves with an accuracy of 0.5 to 2 cm, depending on the requirements and the resulting navigation hardware.
Thanks to Innok COCKPIT™'s intuitive user interface, the system can be used efficiently by the user after a very short familiarisation period. Whether on a PC, tablet or smartphone, the robot can be tracked and controlled from almost any end device.
.png?width=1719&height=970&name=Bild%20(1).png)
Example of our user interface for a cemetery.
- Lines represent the robot's travel paths
- Green dots are graves that have already been poured
- Yellow dots are graves that still need to be poured
- Blue dots are refuelling stations
Easy to use via PC/MAC, tablet or smartphone with all modern browsers such as Chrome or Safari.

High-precision image data
Innok HYBRID NAVIGATION also includes high-precision image data. At Innok, we record this with a special scanner from Riegl. The data is captured visually and using a 3D lidar laser. This produces navigation data with extreme accuracy.
The example shows an overview of a scan of a cemetery.
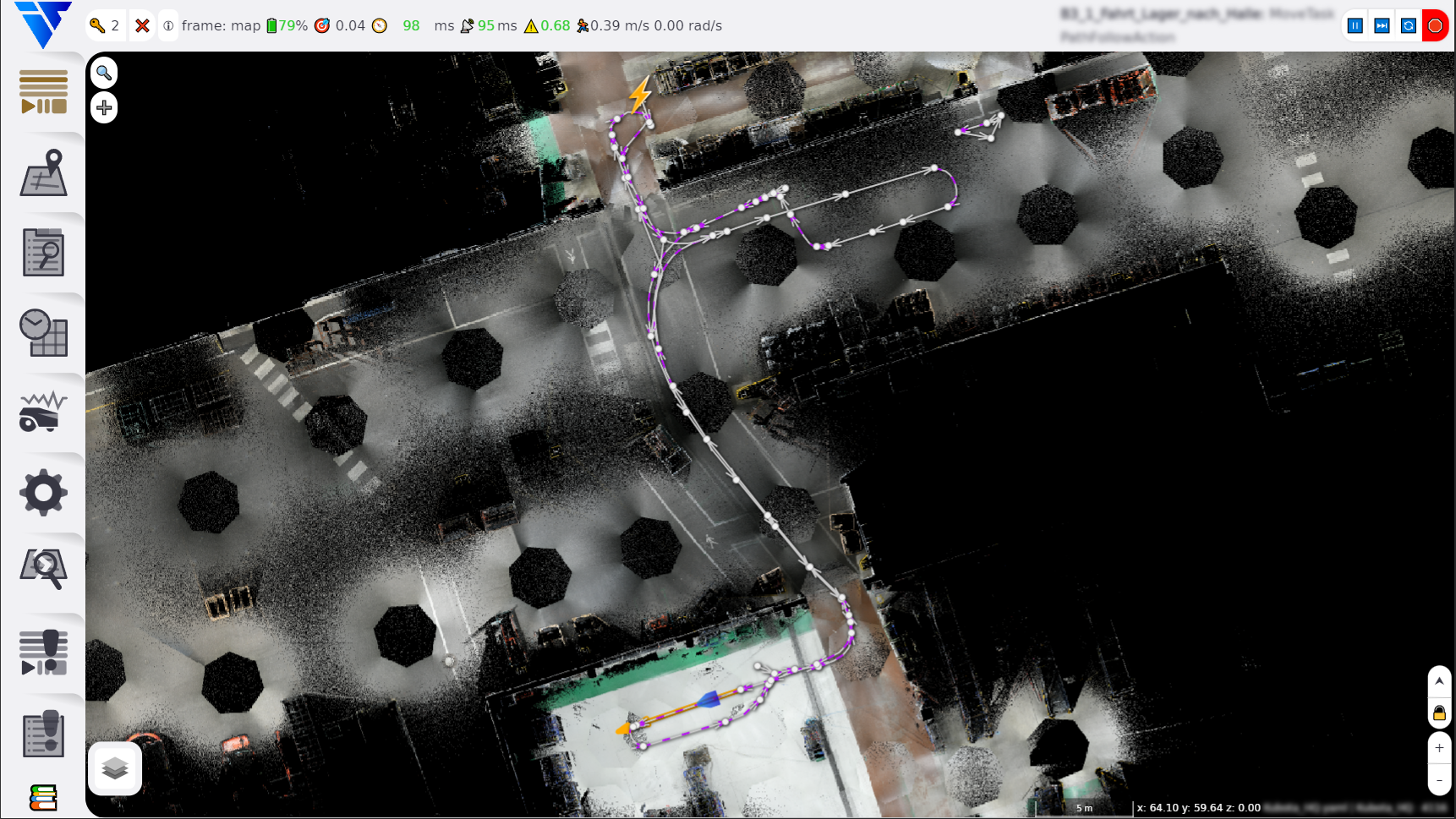
Example of our user interface for an industrial company.
The lines represent the robot's travel paths
- In this example, the robot switches from indoor to outdoor areas without interruption when travelling between two halls.
- Stopping points and stations (e.g. when transporting pallets) can be set up individually.
This view can also be operated via PC/MAC, tablet or smartphone with all modern browsers such as Chrome or Safari.
This means that the most suitable technology is used.
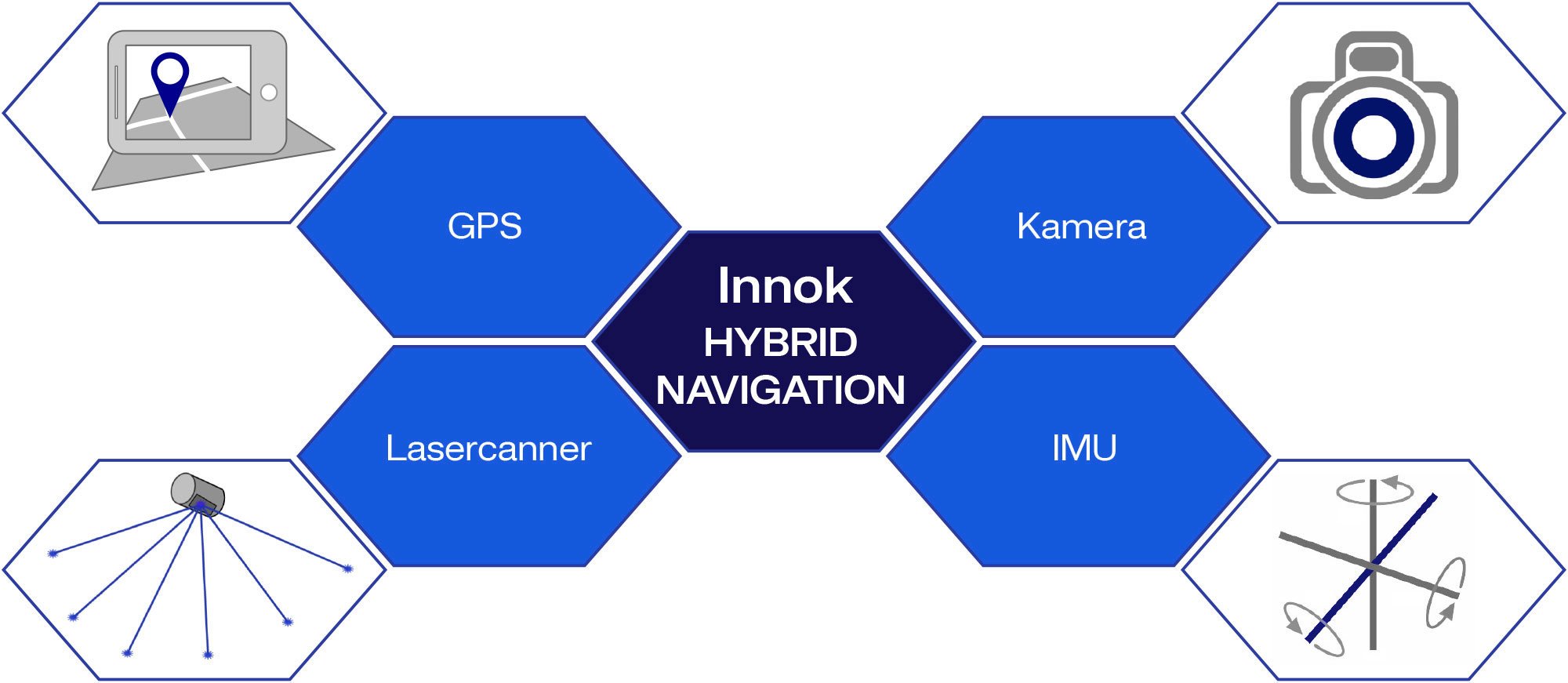
Innok HYBRID NAVIGATION™ is installed on board and offers a wide range of state-of-the-art navigation technologies. This means that the most suitable technology for the current circumstances is always used.
In order to fulfil its tasks, a mobile robot must above all have suitable and reliable self-localisation and navigation. Innok HYBRID NAVIGATION™ technology covers all common application scenarios: Whether in a production hall, a logistics hall, in open outdoor areas, in outdoor areas with vegetation, in tunnels or underground - Innok HYBRID NAVIGATION™ uses either GPS, high-precision GPS (RTK GNSS), high-performance 2D and 3D laser scanners, as well as camera/vision and radar technologies and integrates these into a highly precise and maximally reliable overall system.
Save valuable working time with the experts from Innok Robotics.
With Innok ReMain™, your robot is connected to the Innok Robotics Cloud at all times and our employees can respond to your enquiries immediately and without delay. One call is all it takes for us to explain the current status of the robot, bring the system up to date with the latest developments or help you set it up for your changed requirements. Innok ReMain™ also makes it possible to predict the maintenance requirements of your AMR based on the analysed data (predictive maintenance).
As part of an attractive ongoing service contract, we also inform you proactively and in good time to ensure error-free operation at all times.
