Für schwierigste Anforderungen von ferngesteuert bis vollautonom.
Um seine Aufgaben erfüllen zu können, muss ein mobiler Roboter vor allem über eine geeignete und zuverlässige Selbstlokalisierung und Navigation, Obstacle Detection sowie diverse Aktoriken (z.B. das vollautonome An- und Abkuppeln von Anhängern oder das Handling von Ladegütern durch einen auf dem AMR integrierten COBOT-Arm) verfügen.
Alle gängigen Navigationsaufgaben – Indoor & Outdoor
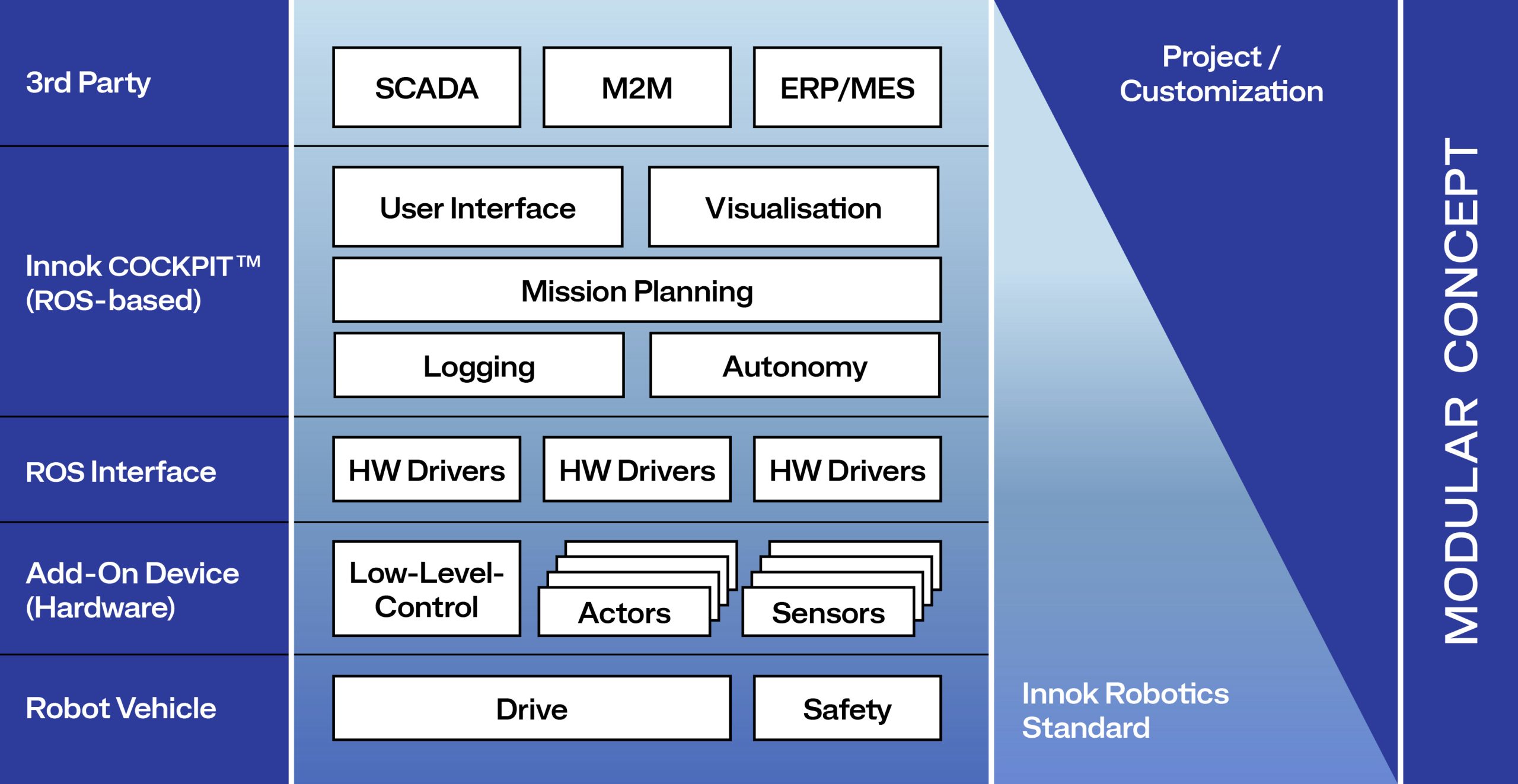
Unsere modulare Software Innok COCKPIT™ deckt alle gängigen Navigationsaufgaben ab und ermöglicht es, die Navigation Ihres Roboters auf Ihre Anwendung optimal zuzuschneiden. Ob Fernsteuerung, Personen folgen oder automatisches Abfahren festgelegter Routen – Innok COCKPIT übernimmt alle Aufgaben, die für die Navigation eines Roboters erforderlich sind. Dank der intuitiven Benutzerschnittstelle kann die Software schon nach sehr kurzer Einarbeitungszeit durch den Nutzer effizient eingesetzt werden.
Innok COCKPIT™ basiert grundsätzlich auf den Open System Robotersteuerungs-Software Bibliotheken ROS / ROS2. Die Illustration zeigt die Einbindung von Innok COCKPIT™ in den Software Stack.

Alleinstellung Innok Robotics
Um die beste Präzision, Zuverlässigkeit und Usability Made-in-Germany zu erreichen, haben wir in den vergangenen 10 Jahren den proprietären Code unserer Autonomie-Software Innok COCKPIT™ permanent weiterentwickelt, verbessert und durch leistungsfähige Algorithmen für eine Vielzahl von AMR Tasks angereichert. Durch das Zusammenspiel von technisch hochwertigen mechanischen Komponenten (Power-Akkus, leistungsstarke Elektromotoren, Sensoren, 2D/3D Scannern) produzieren wir als einer der Marktführer qualitativ hochwertige AMRs. Durch intelligente, KI basierte Sensordaten-Fusion meistern unsere AMRs auch komplizierte Einsatzsituationen unter anderem im Außenbereich (Outdoor oder All Terrain) – Felder, auf denen wir teilweise weltweit über eine Alleinstellung (USP) verfügen. Mobile Innok Roboter lokalisieren sich mit einer Genauigkeit von 0,5 bis 2 cm, je nach Bedarfslage und daraus abgeleiteter Navigations-Hardware.
Dank der intuitiven Benutzerschnittstelle von Innok COCKPIT™ kann das System schon nach sehr kurzer Einarbeitungszeit durch den Nutzer effizient eingesetzt werden. Egal ob auf PC, Tablet oder Smartphone: Der Roboter kann von nahezu jedem Endgerät getrackt und gesteuert werden.
.png?width=1719&height=970&name=Bild%20(1).png)
Beispiel unserer Bedienoberfläche für einen Friedhof.
- Linien stellen die Fahrwege des Roboters dar
- Grüne Punkte sind bereits gegossene Gräber
- Gelbe Punkt sind Gräber, die noch gegossen werden müssen
- Blaue Punkte sind Tankstationen
Einfach zu bedienen per PC/MAC, Tablet oder Smartphone mit allen modernen Browsern wie Chrome oder Safari.

Hochpräzise Bilddaten
Zur Innok HYBRID NAVIGATION gehören auch hochpräzise Bilddaten. Diese nehmen wir bei Innok mit einem Spezialscanner der Firma Riegl auf. Die Erfassung erfolgt hier kombiniert visuell und über einen 3D Lidar Laser. Daraus entstehen Navigationsdaten mit extremer Genauigkeit.
Das Beispiel zeigt die Übersicht eines Scans von einem Friedhof.
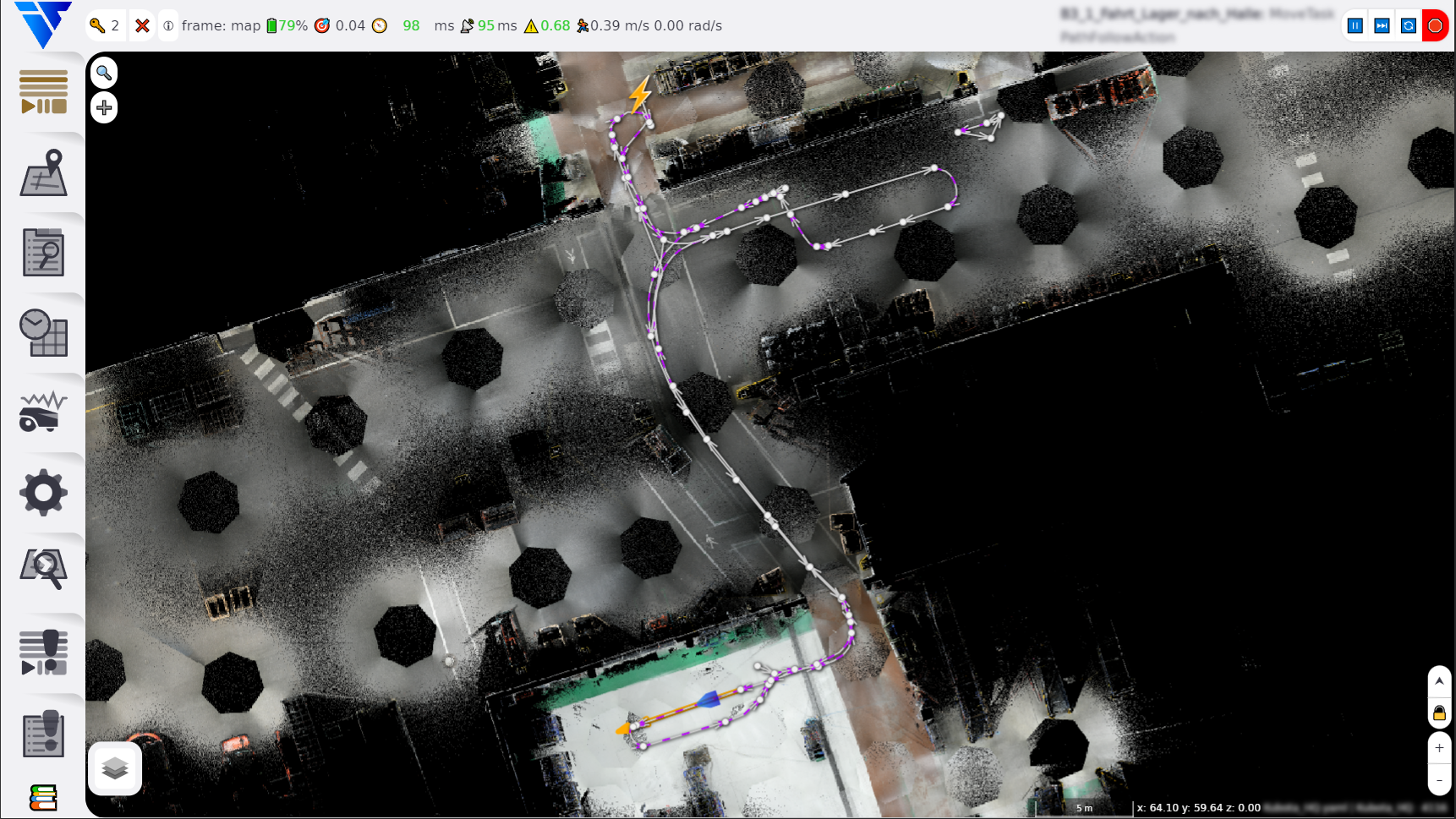
Beispiel unserer Bedienoberfläche für einen Industriebetrieb.
- Die Linien stellen die Fahrwege des Roboters dar
- Der Roboter wechselt in diesem Beispiel völlig unterbrechungsfrei von Innenbereichen in Außenbereiche bei der Fahrt zwischen zwei Hallen.
- Haltepunkte und Bahnhöfe (z.B. beim Transport von Paletten) können individuell eingerichtet werden.
Auch diese Ansicht ist zu bedienen per PC/MAC, Tablet oder Smartphone mit allen modernen Browsern wie Chrome oder Safari.
Damit kommt genau die am besten geeignete Technik zum Einsatz.
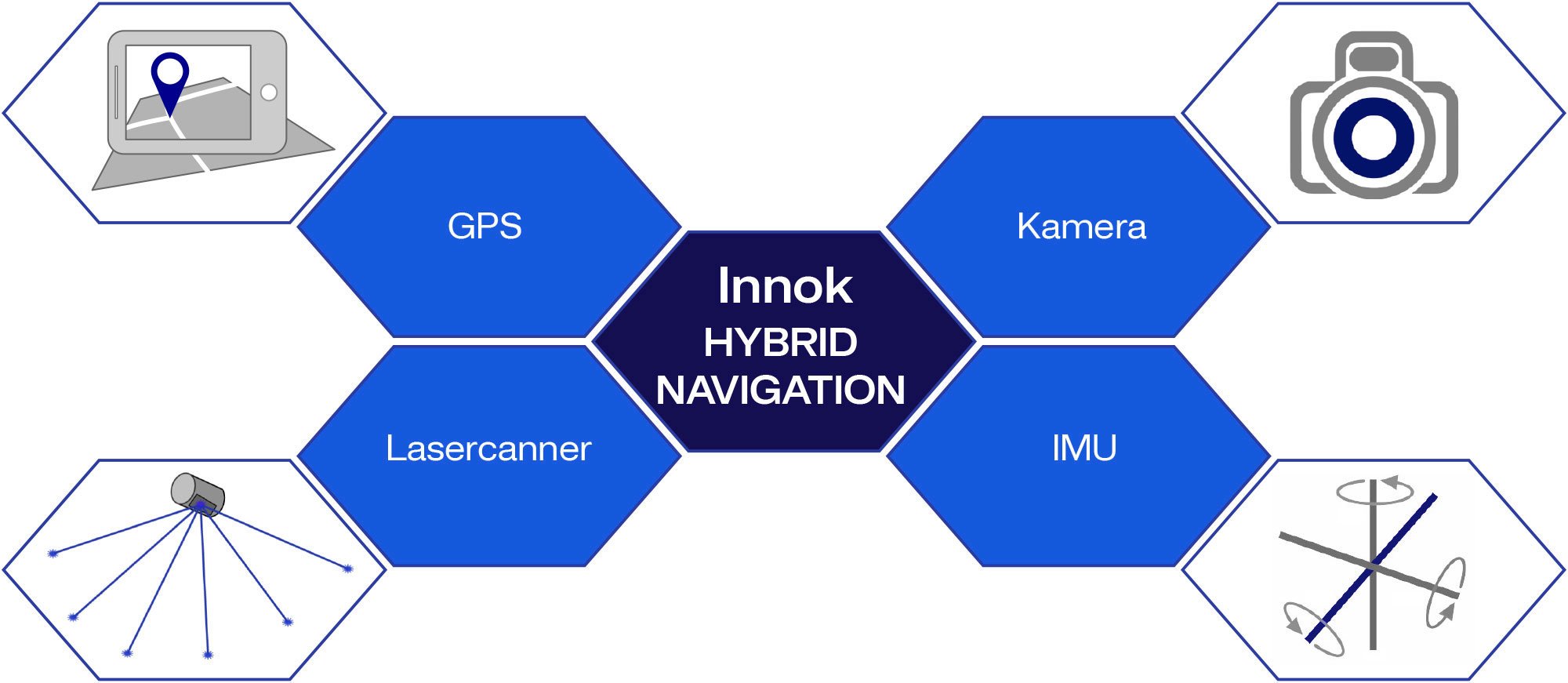
Innok HYBRID NAVIGATION™ ist on board verbaut und bietet eine breite Palette von state-of-the-art Navigationstechnologien. Damit kommt immer genau die für die aktuellen Umstände am besten geeignete Technik zum Einsatz.
Um seine Aufgaben erfüllen zu können, muss ein mobiler Roboter vor allem über eine geeignete und zuverlässige Selbstlokalisierung und Navigation verfügen. Die Innok HYBRID NAVIGATION™ Technologie deckt alle gängigen Einsatzszenarien ab: Ob in einer Produktionshalle, einer Logistikhalle, im offenen Außenbereich, im Außenbereich mit Bewuchs, in Tunneln oder unter Tage – Innok HYBRID NAVIGATION™ setzt wahlweise GPS, hochpräzises GPS (RTK GNSS), High Performance 2D und 3D Laser-Scanner, sowie Kamera/Vision- und Radar-Technologien ein und integriert diese zu einem hochpräzisen und maximal zuverlässigen Gesamtsystem.
Mit den Experten von Innok Robotics sparen Sie wertvolle Arbeitszeit.
Mit Innok ReMain™ ist Ihr Roboter jederzeit mit der Innok Robotics Cloud verbunden und unsere Mitarbeiter können sofort und ohne Verzögerungen auf Ihre Anfragen reagieren. Ein Anruf genügt und wir erklären Ihnen den aktuellen Zustand des Roboters, bringen das System auf den aktuellen Stand der Entwicklungen oder helfen Ihnen bei der Einrichtung für Ihre geänderten Anforderungen. Innok ReMain™ erlaubt es zudem anhand der analysierten Daten, vorausschauende Vorhersagen zum Wartungsbedarf Ihres AMRs zu treffen (Predictive Maintenance).
Im Rahmen eines attraktiven laufenden Servicevertrags informieren wir Sie auch proaktiv und rechtzeitig, um jederzeit einen fehlerfreien Betrieb sicherzustellen.
